
机器学习:监督学习、无监督学习、半监督学习、强化学习
机器学习是一种人工智能领域的技术,它旨在让计算机通过学习数据和模式,而不是明确地进行编程来完成任务。机器学习分为监督学习(Supervised Learning)、无监督学习(Unsupervised Learning)、半监督学习(Semi-supervised Learning)、强化学习(Reinforcement Learning)四种
1 引言
机器学习是一种人工智能领域的技术,它旨在让计算机通过学习数据和模式,而不是明确地进行编程来完成任务。机器学习分为监督学习(Supervised Learning)、无监督学习(Unsupervised Learning)、半监督学习(Semi-supervised Learning)、强化学习(Reinforcement Learning)四种,下面针对每种学习方式做详细介绍。

2 监督学习
2.1 什么是监督学习
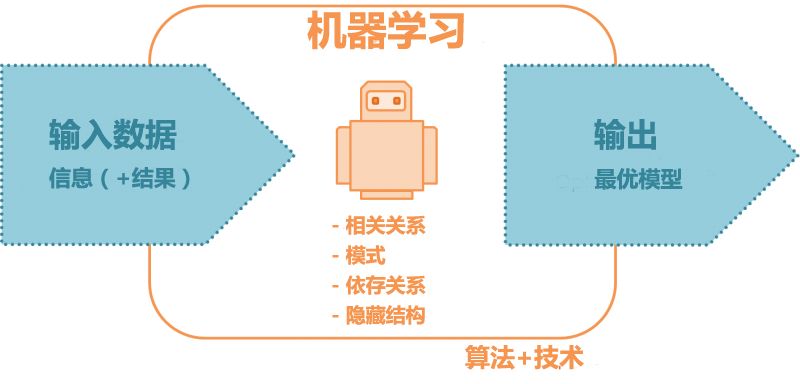
定义:根据已有的数据集,知道输入和输出结果之间的关系。根据这种已知的关系,训练得到一个最优的模型。
在监督学习中训练数据既有特征(feature)又有标签(label),通过训练,让机器可以自己找到特征和标签之间的联系,在面对只有特征没有标签的数据时,可以判断出标签。
简单理解:可以把监督学习理解为我们教机器如何做事情。

2.2 监督学习的类别
监督学习任务主要包括分类和回归两种类型,在监督学习中,数据集中的样本被称为“训练样本”,并且每个样本都有一个输入特征和相应的标签(分类任务)或目标值(回归任务)。。
-
分类(Classification): 在分类任务中,目标是将输入数据分到预定义的类别中。每个类别都有一个唯一的标签。算法在训练阶段通过学习数据的特征和标签之间的关系来构建一个模型。然后,在测试阶段,模型用于预测未见过的数据的类别标签。例如,将电子邮件标记为“垃圾邮件”或“非垃圾邮件”,将图像识别为“猫”或“狗”。
-
回归(Regression): 在回归任务中,目标是预测连续数值的输出。与分类不同,输出标签在回归任务中是连续的。算法在训练阶段通过学习输入特征和相应的连续输出之间的关系来构建模型。在测试阶段,模型用于预测未见过的数据的输出值。例如,预测房屋的售价、预测销售量等。
2.3 常见的监督学习算法
监督学习算法种类众多,有着极其广泛的应用,下面是一些常见的监督学习算法:
-
支持向量机(Support Vector Machine,SVM):SVM是一种用于二分类和多分类任务的强大算法。它通过找到一个最优的超平面来将不同类别的数据分隔开。SVM在高维空间中表现良好,并且可以应用于线性和非线性分类问题。
-
决策树(Decision Trees):决策树是一种基于树结构的分类和回归算法。它通过在特征上进行递归的二分决策来进行分类或预测。决策树易于理解和解释,并且对于数据的处理具有良好的适应性。
-
逻辑回归(Logistic Regression):逻辑回归是一种广泛应用于二分类问题的线性模型。尽管名字中带有"回归",但它主要用于分类任务。逻辑回归输出预测的概率,并使用逻辑函数将连续输出映射到[0, 1]的范围内。
-
K近邻算法(K-Nearest Neighbors,KNN):KNN是一种基于实例的学习方法。它根据距离度量来对新样本进行分类或回归预测。KNN使用最接近的K个训练样本的标签来决定新样本的类别。
1.4 监督学习的应用场景
监督学习是最常见的机器学习方法之一,在各个领域都有广泛的应用,它的成功在很大程度上得益于其能够从带有标签的数据中学习,并对未见过的数据进行预测和泛化。
-
图像识别:监督学习在图像识别任务中非常常见。例如,将图像分类为不同的物体、场景或动作,或者进行目标检测,找出图像中特定对象的位置。
-
自然语言处理:在自然语言处理任务中,监督学习用于文本分类、情感分析、机器翻译、命名实体识别等。
-
语音识别:监督学习在语音识别领域被广泛应用,例如将语音转换为文本、说话者识别等。
-
医学诊断:在医学领域,监督学习可以用于疾病诊断、影像分析、药物发现等。
3 无监督学习
3.1 什么是无监督学习
定义:我们不知道数据集中数据、特征之间的关系,而是要根据聚类或一定的模型得到数据之间的关系。
在无监督学习中数据只有特征(feature)无标签(label),是一种机器学习的训练方式,它本质上是一个统计手段,在没有标签的数据里可以发现潜在的一些结构的一种训练方式。
简单理解:比起监督学习,无监督学习更像是自学,让机器学会自己做事情。

3.2 无监督学习的类别
无监督学习的特点是在训练数据中没有标签或目标值。无监督学习的目标是从数据中发现隐藏的结构和模式,而不是预测特定的标签或目标。无监督学习的主要类别包括以下几种:
-
聚类(Clustering):聚类是将数据样本分成相似的组别或簇的过程。它通过计算样本之间的相似性度量来将相似的样本聚集在一起。聚类是无监督学习中最常见的任务之一,常用于数据分析、市场细分、图像分割等。
-
降维(Dimensionality Reduction):降维是将高维数据转换为低维表示的过程,同时尽可能地保留数据的特征。降维技术可以减少数据的复杂性、去除冗余信息,并可用于可视化数据、特征提取等。常见的降维方法有主成分分析(PCA)和t-SNE等。
-
关联规则挖掘(Association Rule Mining):关联规则挖掘用于发现数据集中项之间的关联和频繁项集。这些规则描述了数据集中不同项之间的关联性,通常在市场篮子分析、购物推荐等方面应用广泛。
-
异常检测(Anomaly Detection):异常检测用于识别与大多数样本不同的罕见或异常数据点。它在检测异常事件、欺诈检测、故障检测等领域有着重要的应用。
无监督学习在数据挖掘、模式识别、特征学习等领域中发挥着重要作用。通过发现数据中的结构和模式,无监督学习有助于我们更好地理解数据,从中提取有用的信息,并为其他任务提供有益的预处理步骤。
3.3 常见的无监督学习算法
无监督学习算法在不同的问题和数据集上都有广泛的应用。它们帮助我们从未标记的数据中发现有用的结构和模式,并在数据处理、可视化、聚类、降维等任务中发挥着重要的作用。以下是一些常见的无监督学习算法:
-
K均值聚类(K-Means Clustering):K均值聚类是一种常用的聚类算法,它将数据样本分成K个簇,使得每个样本与所属簇中心的距离最小化。
-
主成分分析(Principal Component Analysis,PCA):PCA是一种常用的降维算法,它通过线性变换将高维数据投影到低维空间,以保留最重要的特征。
-
关联规则挖掘(Association Rule Mining):关联规则挖掘是一种发现数据集中项之间关联性的方法,它常用于市场篮子分析、购物推荐等领域。
-
异常检测(Anomaly Detection):异常检测算法用于识别与大多数样本不同的罕见或异常数据点。常见的方法包括基于统计的方法、基于聚类的方法和基于生成模型的方法等。
3.4 无监督学习的应用场景
无监督学习在数据挖掘、模式识别、特征学习等应用场景发挥着重要作用。通过无监督学习,我们可以从未标记的数据中获得有用的信息和洞察力,为其他任务提供有益的预处理步骤,并且有助于更好地理解和利用数据。:
-
聚类与分组:无监督学习中的聚类算法可以帮助将数据样本分成相似的组别或簇,例如在市场细分中将顾客分成不同的群体、在图像分割中将图像区域分割成不同的物体等。
-
特征学习与降维:无监督学习的降维算法如PCA和t-SNE可以用于特征学习和可视化高维数据,例如在图像、音频和自然语言处理中,以及用于数据压缩和可视化。
-
异常检测:无监督学习中的异常检测算法可用于发现与大多数数据样本不同的罕见或异常数据点。这在欺诈检测、故障检测和异常事件监测等场景中具有重要应用。
-
关联规则挖掘:无监督学习的关联规则挖掘算法可用于发现数据集中项之间的关联性,常应用于市场篮子分析、购物推荐等领域。
4 半监督学习
4.1 什么事半监督学习
定义:半监督学习的目标是利用同时包含有标签和无标签的数据来构建一个模型,使得模型能够在测试阶段更好地泛化到新的、未见过的数据。
半监督学习介于监督学习和无监督学习之间。在半监督学习中,训练数据同时包含有标签的数据和无标签的数据。
与监督学习不同的是,半监督学习的训练数据中只有一小部分样本是带有标签的,而大部分样本是没有标签的。通常情况下,获取带有标签的数据可能会比较昂贵或耗费大量的时间,而采集无标签的数据则相对容易和便宜。
在半监督学习中,无标签的数据可以起到两个重要作用:
-
利用未标记数据的信息:未标记数据可能包含对数据分布、结构和隐含特征的有用信息,这些信息可以帮助模型更好地进行泛化。
-
利用标记数据的传播效应:通过利用标记数据与无标签数据之间的数据分布相似性,可以通过传播标签信息到无标签样本,进而增强模型的性能。
半监督学习是一个非常有意义且有挑战性的问题,它在现实世界的许多场景中都具有实际应用价值。通过充分利用未标记数据,半监督学习可以在某些情况下显著提高模型的性能,并且有助于在数据有限的情况下构建更加健壮和泛化能力强的机器学习模型。

4.2 半监督学习的类别
半监督学习是介于监督学习和无监督学习之间的一种学习方式,它利用同时包含有标签和无标签数据的训练集来构建模型。半监督学习的类别主要分为以下几种:
-
半监督分类(Semi-supervised Classification):在半监督分类中,训练数据中同时包含带有标签的样本和无标签的样本。模型的目标是利用这些标签信息和无标签数据的分布信息来提高分类性能。半监督分类算法可以在分类任务中利用未标记数据来扩展有标签数据集,从而提高模型的准确性。
-
半监督回归(Semi-supervised Regression):半监督回归任务与半监督分类类似,但应用于回归问题。模型通过有标签的数据和无标签数据进行训练,以提高对未标记数据的回归预测准确性。
-
半监督聚类(Semi-supervised Clustering):半监督聚类算法将有标签数据和无标签数据同时用于聚类任务。它们可以通过结合数据的相似性信息和标签信息,来更好地识别潜在的簇结构。
-
半监督异常检测(Semi-supervised Anomaly Detection):半监督异常检测任务旨在从同时包含正常样本和异常样本的数据中,利用有限的标签信息来检测异常。这在异常样本较少的情况下特别有用。
-
生成对抗网络(GANs)中的半监督学习:GANs可以被用于实现半监督学习。在这种情况下,生成器和判别器网络可以使用有标签和无标签的样本,以提高生成模型的性能。
半监督学习是一种具有挑战性的学习范式,因为它需要充分利用未标记数据,同时还要防止过度拟合未标记数据。在实际应用中,根据问题的性质和可用的数据,选择适当的半监督学习方法和技术,可以帮助提高模型性能和泛化能力。
4.3 常见的半监督学习算法
半监督学习算法可以在不同的问题和数据集上发挥作用。选择合适的半监督学习算法取决于问题的特性、可用的有标签和无标签数据量,以及算法的性能和复杂度要求。半监督学习在处理数据有限或数据标记成本高昂的场景下具有重要的应用价值。以下是一些常见的半监督学习算法:
-
自训练(Self-Training):自训练是一种简单的半监督学习方法。它通过使用有标签数据训练一个初始模型,然后使用该模型对未标记数据进行预测,并将置信度较高的预测结果作为伪标签,将未标记数据添加到有标签数据中,然后重新训练模型。
-
协作训练(Co-Training):协作训练是一种使用多个视图或特征的半监督学习方法。它通过将数据划分为两个或多个视图,并在每个视图上独立训练模型。然后,模型之间相互交互并使用对方的预测结果来增强训练。
-
半监督支持向量机(Semi-Supervised Support Vector Machines):半监督支持向量机是基于支持向量机的半监督学习方法。它利用有标签数据和未标记数据之间的关系来学习一个更好的分类器。
-
生成式半监督学习(Generative Semi-Supervised Learning):这类方法尝试使用生成模型来建模数据的分布,并利用有标签和无标签数据共同训练生成模型,以提高对未标记数据的预测。
-
半监督深度学习:近年来,许多深度学习方法已经扩展到半监督学习。这些方法通过在深度神经网络中引入半监督性质,如半监督自编码器(Semi-Supervised Autoencoders)等,来利用未标记数据的信息。
-
图半监督学习(Graph-based Semi-Supervised Learning):图半监督学习方法利用数据样本之间的关系来辅助半监督学习。这些方法通常利用图模型或图卷积神经网络(GCN)来利用数据的拓扑结构。
4.4 半监督学习的应用场景
半监督学习在许多实际应用场景中具有重要的应用价值,尤其在数据有限或数据标记成本高昂的情况下。以下是一些半监督学习的应用场景:
-
自然语言处理:在自然语言处理任务中,很多时候获取大规模的标记数据是非常昂贵和耗时的。半监督学习可以利用少量有标签的文本数据和大量未标签的文本数据来提高文本分类、情感分析、命名实体识别等任务的性能。
-
图像识别和计算机视觉:在图像识别和计算机视觉领域,获取大规模的标记图像数据也可能是困难的。半监督学习可以在少量有标签图像和大量未标签图像上进行训练,以提高图像分类、目标检测等任务的准确性。
-
数据聚类:在聚类任务中,半监督学习可以将有标签和未标签数据结合起来进行聚类,从而提高聚类结果的准确性和稳定性。
-
医学图像和诊断:在医学图像分析和诊断中,获取大量标记的医学图像数据可能是困难的。半监督学习可以在少量有标签医学图像和大量未标签医学图像上进行训练,提高医学图像分割、病变检测等任务的性能。
-
机器人控制:在机器人控制领域,半监督学习可以帮助机器人在未知环境中进行自主决策和学习,从而提高其任务执行能力。
-
图像生成和数据增强:在生成式模型中,半监督学习可以结合有标签和未标签数据来训练模型,以提高生成模型的质量和多样性。
这些场景中,半监督学习能够有效地利用未标签数据的信息,帮助提高模型性能和泛化能力。然而,半监督学习也面临着挑战,例如如何有效地利用未标签数据,避免过拟合和不平衡问题。在实际应用中,需要根据具体问题和数据情况选择适合的半监督学习方法。
5 强化学习
5.1 什么是强化学习
定义: 强化学习是让一个智能体(agent)在环境中通过尝试和错误来学习行为策略。智能体通过与环境进行交互,根据奖励信号来调整其行为策略,以达到最大化累积奖励的目标。
在强化学习中,智能体不需要明确地告诉如何执行任务,而是通过尝试和错误的方式进行学习。当智能体在环境中采取某个动作时,环境会返回一个奖励信号,表示该动作的好坏程度。智能体的目标是通过与环境交互,学习到一种最优策略,使其在长期累积的奖励最大化。

强化学习的过程可以描述为智能体与环境之间的不断交互过程
(1)智能体观察当前环境状态(state)。
(2)基于当前状态,智能体选择一个动作(action)。
(3)环境根据智能体的动作转换到新的状态,并返回一个奖励信号(reward)。
(4)智能体根据奖励信号更新其策略,以便在将来的决策中获得更好的奖励。
(5)重复以上步骤,直到智能体学习到一个使其获得最大累积奖励的策略。
5.2 强化学习的类别
强化学习是一种机器学习方法,根据智能体(agent)与环境的交互来学习适当的行为策略以最大化累积奖励。强化学习的类别主要可以分为以下几种:
-
基于值的强化学习(Value-Based Reinforcement Learning):基于值的强化学习方法旨在学习价值函数,即给定状态或状态-动作对的值,代表了智能体在该状态或状态-动作对上能够获得的累积奖励的估计值。这些方法通常通过使用贝尔曼方程或其变种来更新价值函数,并使用它来选择动作。
-
基于策略的强化学习(Policy-Based Reinforcement Learning):基于策略的强化学习方法直接学习策略函数,即将状态映射到动作的映射。策略可以是确定性的(对于每个状态只输出一个动作)或是概率性的(对于每个状态输出动作的概率分布)。这些方法通常通过梯度上升方法来更新策略参数,以最大化累积奖励。
-
基于模型的强化学习(Model-Based Reinforcement Learning):基于模型的强化学习方法学习环境的模型,即从状态和动作预测下一个状态和奖励。然后,它可以使用学到的模型进行规划和决策,而无需真实地与环境进行交互。这样可以提高样本效率和规划效率。
-
深度强化学习(Deep Reinforcement Learning):深度强化学习将深度神经网络与强化学习相结合。它通常使用深度神经网络来近似值函数或策略函数。深度强化学习在处理高维状态空间和动作空间的任务时表现出色。
-
多智能体强化学习(Multi-Agent Reinforcement Learning):多智能体强化学习研究多个智能体在相互作用环境中的学习问题。在这种情况下,每个智能体的策略和动作会影响其他智能体的状态和奖励,因此学习变得更加复杂。
这些是强化学习的主要类别,每个类别中都有许多不同的算法和方法。强化学习在自主决策和学习的问题中具有广泛的应用,例如自动驾驶、机器人控制、游戏玩法等。
5.3 常见的强化学习算法
强化学习算法在处理不同类型的任务和问题时表现出色,并在自主决策和学习的领域中发挥着重要作用。它们通常用于解决自动驾驶、机器人控制、游戏玩法和其他需要决策和学习的任务。以下是一些常见的强化学习算法:
-
Q-Learning:Q-Learning是一种基于值的强化学习算法。它通过学习一个值函数(Q函数)来表示在给定状态下采取某个动作的累积奖励。Q-Learning使用贝尔曼方程更新Q值,并使用贪心策略来选择动作。
-
SARSA:SARSA是另一种基于值的强化学习算法。它与Q-Learning类似,但不同之处在于它在学习和决策阶段都使用当前策略的动作来更新Q值。
-
DQN(Deep Q Network):DQN是一种深度强化学习算法,结合了深度神经网络和Q-Learning。它使用深度神经网络来近似Q函数,通过经验回放和目标网络来稳定训练。
-
A3C(Asynchronous Advantage Actor-Critic):A3C是一种基于策略的强化学习算法,它结合了Actor-Critic方法和异步训练。A3C使用多个智能体并行地训练,以提高样本效率。
-
PPO(Proximal Policy Optimization):PPO是一种基于策略的强化学习算法,它通过限制更新幅度来稳定训练。PPO在深度强化学习中表现出色,并被广泛应用于各种任务。
-
TRPO(Trust Region Policy Optimization):TRPO是另一种基于策略的强化学习算法,它使用限制步长的方法来保证更新策略时不会使性能变差。
5.4 强化学习的应用场景
强化学习在许多实际应用场景中具有广泛的应用,尤其是那些需要自主决策和学习的任务。强化学习能够使智能体从与环境的交互中学习,并根据学到的知识做出适当的决策,以达到预定的目标或最大化累积奖励。由于强化学习的自主学习和决策特性,它在许多自主系统和智能系统中都有重要的应用潜力。以下是一些强化学习的应用场景:
-
自动驾驶:强化学习可以应用于自动驾驶领域,使车辆能够根据环境和交通状况做出决策,例如规划路径、避免障碍物和遵守交通规则。
-
机器人控制:强化学习可以帮助机器人在未知环境中进行自主探索和学习,以完成复杂的任务,例如导航、抓取物体和人机交互。
-
游戏:强化学习在游戏玩法中有广泛的应用。例如,使用强化学习训练智能体来玩电子游戏、围棋、扑克等,使其能够与人类玩家媲美甚至超越。
-
医疗治疗:强化学习可以在医疗领域中应用于个性化治疗和药物治疗决策,根据患者的情况和病情做出合适的治疗计划。
-
语音识别和自然语言处理:强化学习可以应用于语音识别和自然语言处理任务,使智能体能够更好地理解和生成自然语言。

科技之力与好奇之心,共建有温度的智能世界
更多推荐

 47
47 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)